内容
自动驾驶交通事故责任的问题关键在于,法律如何评价人机共驾时发生的系统风险性责任。在没有专门法的背景下,适用现行法将会陷入传统交通事故责任理论失效、二元责任界限模糊等迷局。
(一)如何评价驾驶人的责任
我国《民法典》未对自动驾驶交通事故责任作出专门规定,该责任应适用过错责任归责。为了判断自动驾驶的驾驶人的过错程度,必须分析事故发生时驾驶系统所处的自动等级以判断行为人有无注意义务。零级模式无异于普通机动车,可直接适用现行法的相关规定。当系统运行处于一般自动驾驶(一至三级)情况下,驾驶人具有干预的可能性和干预义务。当系统运行处于高度自动驾驶(四至五级)时,由自动驾驶系统控制汽车,应当视为驾驶人有干预能力但不具有干预义务。
在一般自动驾驶模式下,驾驶人按照自动驾驶系统警示操作也可能无法避免事故,这就很难推断出驾驶人具有过错。在高度自动驾驶模式下,智能系统会向驾驶人提出警示或请求,但根据自动驾驶标准驾驶人可以不回应,此时驾驶人不回应系统请求就不能视为具有过错。
(二)如何评价自动驾驶系统的责任
人工智能的思维逻辑不同于人类和一般的程序,它是通过感知到的信息与大数据的学习成果综合对比后自主下达的指令。自动驾驶系统需要学习多少数据才具备相当的注意义务本就难以判断,这就使得法官甚至专业人士难以判断驾驶系统的过错程度。即使有这样一种标准,其可以推定机器的过错,过错责任也难以应用。因为在“人类中心主义”的法律时代,机器被认为是完全按照程序员编程指令做出决策的。当机器没有按照预设的程序运行时,法律并不会认为这是机器的“过失”,而会认为是编程人员“故意”为之。然而,这又违反了自动驾驶的智能性。
(三)如何评价生产者的责任
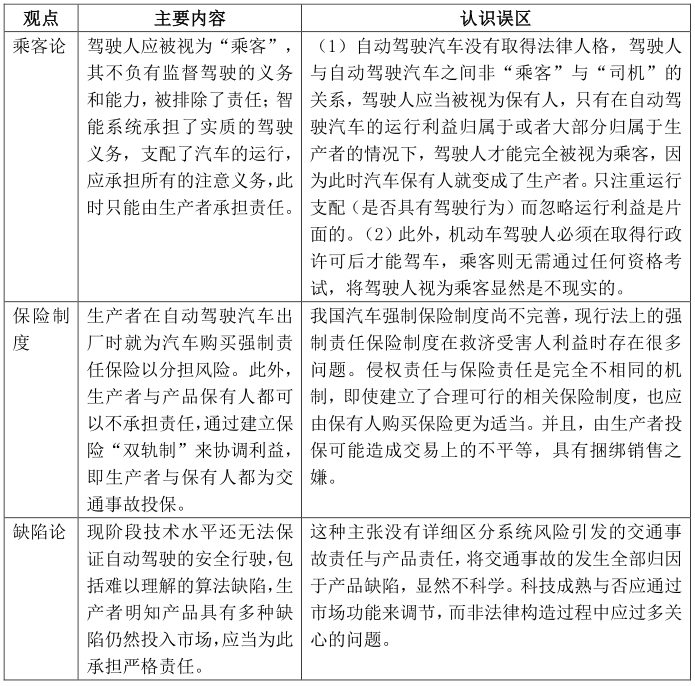
自动驾驶汽车的驾驶人在事故发生时并非车辆的实际控制者,所以许多学者认为应当由生产者来承担系统风险性引发的交通事故责任。由此可能造成交通事故责任与产品责任的边界不明问题。当机动车因自身的质量缺陷发生交通事故时,受害人也可以请求生产者或者销售者承担责任,此时生产者承担无过错责任,且与销售者承担着不真正连带责任。这样做存在的关键性问题是,自动驾驶系统的风险性是否属于“产品缺陷”,以及如何解释自动驾驶汽车中的产品缺陷。一方面,自动驾驶汽车内的智能驾驶系统是否属于产品还没有定论。另一方面,判断系统风险是否属于产品缺陷非常困难。此外,自动驾驶系统的驾驶决策具有独立性,非生产者所能干涉。在此等情况下,让生产者仍然为自己的“产品”承担责任是否具有合理性?
(一)逻辑前提:自动驾驶系统的“物”化
人工智能的关键问题是怎样确定侵权责任的归属,即相关责任关联给谁,责任关联的理论支撑是什么。人工智能不具有法律主体资格,因为只有人类才能够理解义务与责任,人工智能只是遵从规则,却不能理解规则。
首先,自动驾驶汽车是一种弱人工智能产品,更接近一种工具化的产品。所有支持人工智能应该获得法律主体地位的观点,都是针对强人工智能产品的一种讨论,而非针对弱人工智能产品。其次,侵权法是救济法,责任承担最终需要落实于损害赔偿上。自动驾驶系统无法独立地承担民事责任,最终的赔偿责任仍将由人来承担。因此,从法律功能与实际效果看,智能系统法律人格化也完全没有必要。最后,在现行法的框架下通过解释足以解决自动驾驶的侵权责任问题。就现阶段而言,智能系统被视为管家或者助手似乎更加符合人工智能的产品定位,将自动驾驶汽车看作“科技工具”可以避免其智能性带来的法律困扰。
(二)生产者为自动驾驶系统的风险性负责之批判
(三)生产者不承担责任的内在原理:可允许的风险理论
自动驾驶汽车交通事故很可能是难以避免的交通事故,在人们享受自动驾驶技术安全性的同时,不应将罕见的风险转嫁给研发者、生产者。如果法律规定生产者要承担这样的事故责任,未免过于严苛。
(四)保有人承担责任的利益衡量
从利益位阶比较分析,不论法律是倾向保护生产者还是保有人,交通安全和受害人利益都不受影响,各方利益问题可简化为“自由”与“科技发展”之间的冲突。支持保护科技发展更具有紧迫性。其一,科技发展的受益人更加广泛,从利益衡量角度看,当制度不能保护公共利益、抑制了社会进步与发展时,就应当冲破法律的束缚。其二,没有自动驾驶技术的发展也就没有所谓的驾驶人自由利益,正是由于科技发展的红利才使得人类的驾驶行为有了更多自由的可能性。其三,消费者购买自动驾驶汽车更多是为了便利,既然保有人的预期消费目的已经达到,承担一些无法避免的交通事故责任并非不可接受。因此,生产者的利益似乎更值得被法律青睐,保有人为此承担责任也是公平的。
(一)分级体系化
1.一般自动驾驶的交通事故责任
在不考虑保险的情况下,一般自动驾驶交通事故责任法律适用的步骤如下。

2.高度自动驾驶的保有人责任可参照高度危险责任
第一,合理性。高度自动驾驶参照适用高度危险责任可围绕行为自身具有危险性、即使尽到注意义务并采取安全措施也无法避免损害、不考虑主观过错三个要件展开。其一,高度自动驾驶具有一定的风险不可控性。其二,自动驾驶事故发生时驾驶人可能不能作出及时反应,无法采取避免损害措施。且反应速度、感触距离均强于人类的自动驾驶汽车都无法避免的损害,人类可能也同样难以避免。其三,裁判者判断智能系统是否存在缺陷、系统过错程度及因果关系存在困难。因此,高度自动驾驶模式完全符合这三个要件。
第二,可行性。在新的专门性法律作出特别规定之前,高度自动驾驶交通事故可以参照《民法典》第1236条适用高度危险致损的危险责任。此时需要注意事故对方的过失甚至故意“碰瓷”行为应如何处理。一方面,尽管危险责任不考虑驾驶人的主观过错,但并不意味着不考虑事故对方的过错。参照《民法典》中高度危险责任的相关规定,事故对方故意造成事故的,高度自动驾驶一方就不应承担责任;对方有重大过错的,可以减轻高度自动驾驶一方的责任。另一方面,当事故对方过错较小时,由高度自动驾驶的保有人承担责任也未尝不可。此种状况应被视为可允许的科技风险,可由保险等制度来分担赔偿责任风险。
(二)交通事故责任与产品责任的界限
生产者不应当承担自动驾驶交通事故责任,并不意味着生产者免于承担所有责任,而是要让生产者的侵权责任回归产品责任,使二元责任体系的边界更加清晰。
自动驾驶交通事故责任应是驾驶人在开启自动驾驶模式后,系统在正常运营时因技术风险引发的责任;未打开自动驾驶系统的,应被认为是一般机动车交通事故;非因智能系统风险性引起的交通事故,可以考虑适用产品责任。产品责任中的产品“缺陷”认定具有决定性意义。作出上述划分的理由在于:一是产品质量责任大多数是严格责任,可以避免裁判者陷入判断生产者技术水平与科技决策合理性的困局;二是通过收紧自动驾驶交通事故责任的入口,以减少裁判者的主观判断,更多地应用国家标准、行业标准以及“消费者期待”等第三方标准。
人工智能不具备民事法律主体资格,自动驾驶系统不能承担责任。由于可允许的风险理论,生产者也不应承担自动驾驶交通事故责任。从利益位阶比较分析,让保有人承担责任,既不会影响交通安全和受害人利益,也有利于支持和保护科技发展。对于保有人责任的承担,应区别一般自动驾驶和高度自动驾驶,分别适用不同的法律。
(本文文字编辑鲍生慧。本文未经原文作者审核。本文为中国民商法律网“原创标识”作品。凡未在“中国民商法律网”微信公众号正式发布的文章,一律不得转载。)
文献链接:《自动驾驶交通事故责任的民法教义学解释进路》







